

一、基础飞行参数设置:构建航线骨架
基础参数是航线的 “骨架”,决定了无人机的飞行轨迹与范围,是所有规划的起点。
飞行范围需通过经纬度坐标或地图选点明确界定,包括起点、终点及作业区域边界。例如,城市建筑航拍需框定具体街区的四至范围,农业植保则要依据地块轮廓划定作业边界,避免无人机超出授权空域。对于大范围作业,可采用多边形区域设置,确保覆盖完整且不越界。
飞行高度设置需兼顾任务需求与空域限制。测绘任务为保证数据精度,通常设置相对地面 50-100 米的高度;电力巡检需根据杆塔高度预留安全距离,一般高于杆塔顶部 10-20 米;而城市航拍需避开高层建筑,同时遵守当地空域对飞行高度的上限规定(如多数城市核心区限高 120 米)。
飞行速度需根据任务类型动态调整。高精度测绘要求低速飞行(3-5 米 / 秒),确保相机曝光充分;农业植保则需匹配药剂喷洒均匀性,速度通常控制在 4-6 米 / 秒;应急巡查可适当提高速度(8-10 米 / 秒)以扩大覆盖范围,但需保证数据采集清晰。
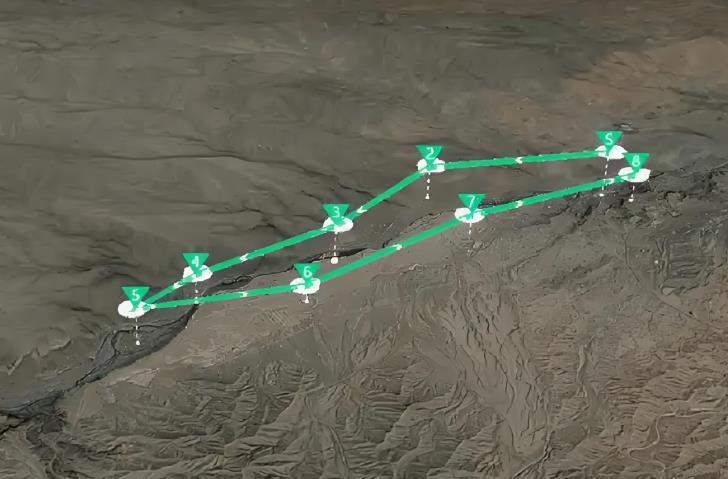
航点坐标是航线的 “节点”,在手动规划模式中需逐点设置。例如,桥梁检测需在桥墩、桥面等关键位置设置航点,确保无人机能精准抵达观测点;而自动化航线(如网格航线)则由系统根据区域范围自动生成航点,但需手动检查关键位置是否覆盖。
二、安全机制设置:筑牢飞行防线
安全机制是航线规划的 “底线”,需贯穿规划全程,防范各类潜在风险。
禁飞区规避是首要安全设置。规划时需导入最新的禁飞区数据(如机场净空区、军事管理区、政府机关上空等),系统会自动检测航线是否穿越禁飞区,若存在冲突则需调整路径。例如,在机场周边 5 公里范围内,航线必须设置在地面以上 100 米以下,且保持与跑道延长线的安全距离。
障碍物避让功能需根据环境复杂度开启不同模式。在城市建筑群中,应启用三维避障规划,无人机通过传感器实时识别楼宇、塔吊等障碍物并自动绕飞;在山区作业则需预设安全高度,确保航线高于山脊线 50 米以上;对于电力巡检等已知障碍物场景,可手动标记杆塔位置,设置绕飞半径(通常 5-10 米)。
应急措施设置包括失控应对与低电量保护。失控时可选择 “返航至起点” 或 “悬停等待” 模式,前者适用于开阔区域,后者适用于复杂地形;低电量保护需设置返航阈值(通常剩余电量 20%-30%),同时预留应急电量(约 10%),确保无人机有足够动力返回降落点。
冗余路径规划在关键任务中必不可少。例如,油气管道巡检需设置主航线与备用航线,当主航线因信号干扰中断时,无人机可自动切换至备用航线继续作业,避免数据采集中断。
三、任务适配设置:匹配作业需求
不同任务对航线的要求差异显著,需针对性设置参数以提升作业效果。
航拍测绘类航线需重点设置重叠率与飞行模式。航向重叠率通常设置为 70%-80%,旁向重叠率 50%-60%,确保后期拼接的三维模型无漏洞;飞行模式多采用 “网格航线”,使相机垂直向下拍摄,适用于地形图绘制;若需获取建筑物立面数据,则需开启 “环绕航线” 或 “倾斜摄影模式”,从多角度采集影像。
农业植保类航线需围绕喷洒效率与均匀性设置。采用 “平行线航线”,使无人机沿地块长边飞行,减少转向次数;根据作物高度设置航线间距(通常 3-6 米),确保雾滴覆盖无死角;同时设置 “断点续喷” 功能,当无人机中途返航充电后,可从断点继续作业,避免重复喷洒或漏喷。
电力巡检类航线需针对设备细节优化。采用 “折线航线” 沿线路走向飞行,在杆塔位置设置 “停留点”,使无人机悬停拍摄绝缘子、导线等部件;根据线路电压等级调整拍摄距离(500kV 线路通常保持 10-15 米距离),确保既能看清细节又不引发电磁干扰。
搜索救援类航线需兼顾覆盖速度与精度。初期采用 “扇形扫描航线” 快速覆盖大片区域,发现目标后切换为 “螺旋航线” 围绕目标飞行,获取精确位置与状态信息;同时设置 “热成像相机同步航线”,使红外设备始终对准扫描区域,提升夜间搜救效率。
四、环境适配设置:应对复杂条件
环境因素直接影响航线执行效果,规划时需充分考虑并设置适配参数。
气象适应设置包括风力补偿与降水应对。在风力 3-4 级时,开启 “风场补偿” 功能,无人机自动调整飞行姿态保持航线稳定;若作业期间可能出现小雨,需设置 “降水阈值”(如降水量超过 0.5mm/h 自动返航),并提前规划避雨降落点。
地形跟随功能在山区、丘陵地区至关重要。开启 “高程跟随” 模式后,无人机通过 GPS 或激光雷达实时获取地形数据,保持相对地面的恒定高度(如山坡作业保持高度 50 米),避免撞山或高度过高导致数据模糊。
信号增强设置用于复杂电磁环境。在城市高楼区或高压线下,需设置 “跳频通讯” 模式,避免信号干扰;同时规划 “信号中继点”,当无人机飞至信号盲区时,自动绕飞至中继点范围内再继续作业,确保数据实时回传。
光照适配在航拍任务中不可忽视。根据日出日落时间设置 “黄金时段航线”(如早晨 6-8 点),此时光线柔和,拍摄画面对比度适中;若需在强光下作业,可设置 “相机参数联动航线”,无人机根据光照强度自动调整快门与 ISO,保证影像曝光正常。
五、数据与能源管理设置:保障任务续航
数据采集与能源消耗的平衡,是航线规划可持续性的关键。
数据存储与传输设置需匹配作业时长。长时间作业(如 8 小时以上)应开启 “边飞边传” 模式,无人机实时将数据传回地面站,避免本地存储满导致停机;对于高精度影像数据,可设置 “分级存储”,关键区域数据高清保存,其他区域压缩存储,节省空间。
电池规划需精确计算能耗。根据航线总距离、飞行高度与负载(如挂载相机、喷洒设备),系统可自动估算所需电量,规划 “充电点” 或 “换电点”。例如,10 公里航线搭配 5 公斤负载,需预留 50% 电量,若中途电量不足,无人机可自动前往预设换电点,完成更换后继续作业。
任务优先级设置用于多目标作业。当航线包含多个任务点时,可标记 “紧急任务点”(如故障杆塔),无人机优先完成该点作业,再按顺序执行其他任务,确保关键目标不被遗漏。
无人机航线规划是一项系统工程,需将基础参数、安全机制、任务需求、环境条件与能源管理有机融合。在实际操作中,规划者需结合无人机型号(如多旋翼、固定翼)、载荷性能与作业场景,通过多次模拟测试优化参数,才能实现 “安全、高效、精准” 的飞行目标。随着自主规划算法的发展,未来航线设置将更趋智能化,但人工对核心参数的把控仍是确保任务成功的关键。


